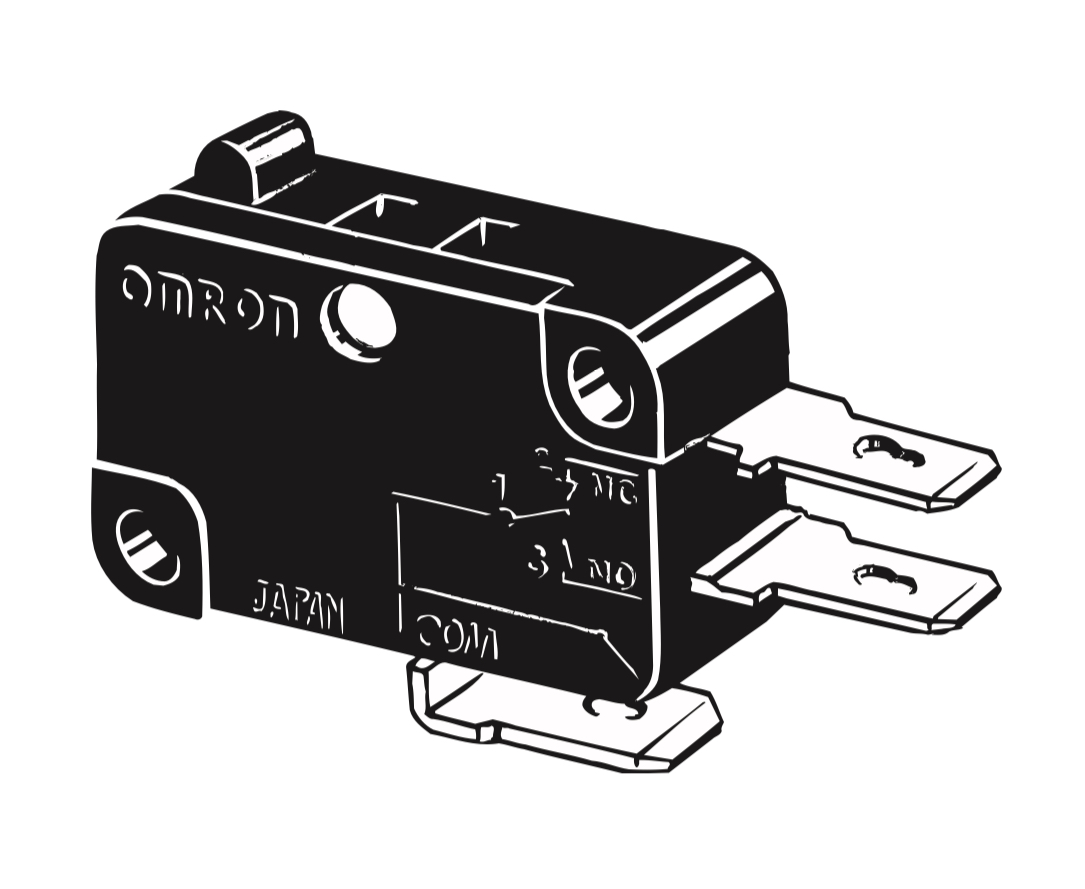
The Omron V-15-1A6 switch is the same as the Omron V-10-1A5 switch used in the stock JLF, except instead of 200g actuation force, it has a 400g actuation force. If you want a more solid, higher tension, faster return to neutral feel, then give this mod a try. The higher actuation force increases the tactile feedback, so you can feel when you hit each direction. It makes the JLF even more clicky.
The Omron V-15-1A6 is too high tension for buttons, but the Omron V-10-1A5 works great if you like a high tension clicky button with tons of tactile feedback. My build maximizes tactile feedback and only uses Omron snap action switches in the buttons and joystick. Clickity, clickity, click!
2 Likes
I kinda want to put the 400g Omron switches in some IL buttons now
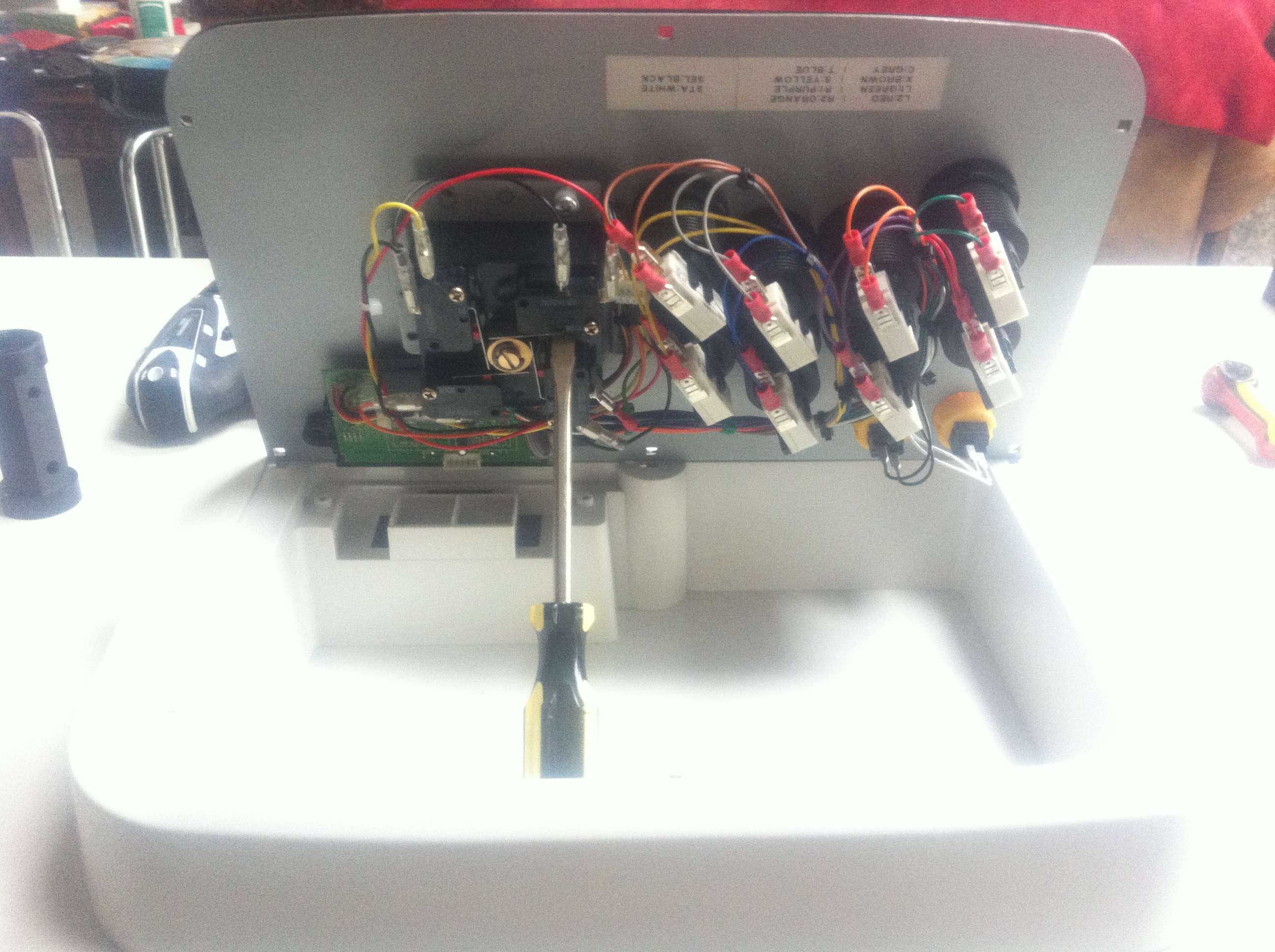
Very cool stick, would benefit from some wire management, I know american style buttons are hard to deal with but it can be done, you’ll be happy with the results too as it’ll be easier to mod in the future if need be. If you line the buttons on a diagonal you’ll find the space needed to wire them neatly. Here’s a pic to show an example although it could have been done better.
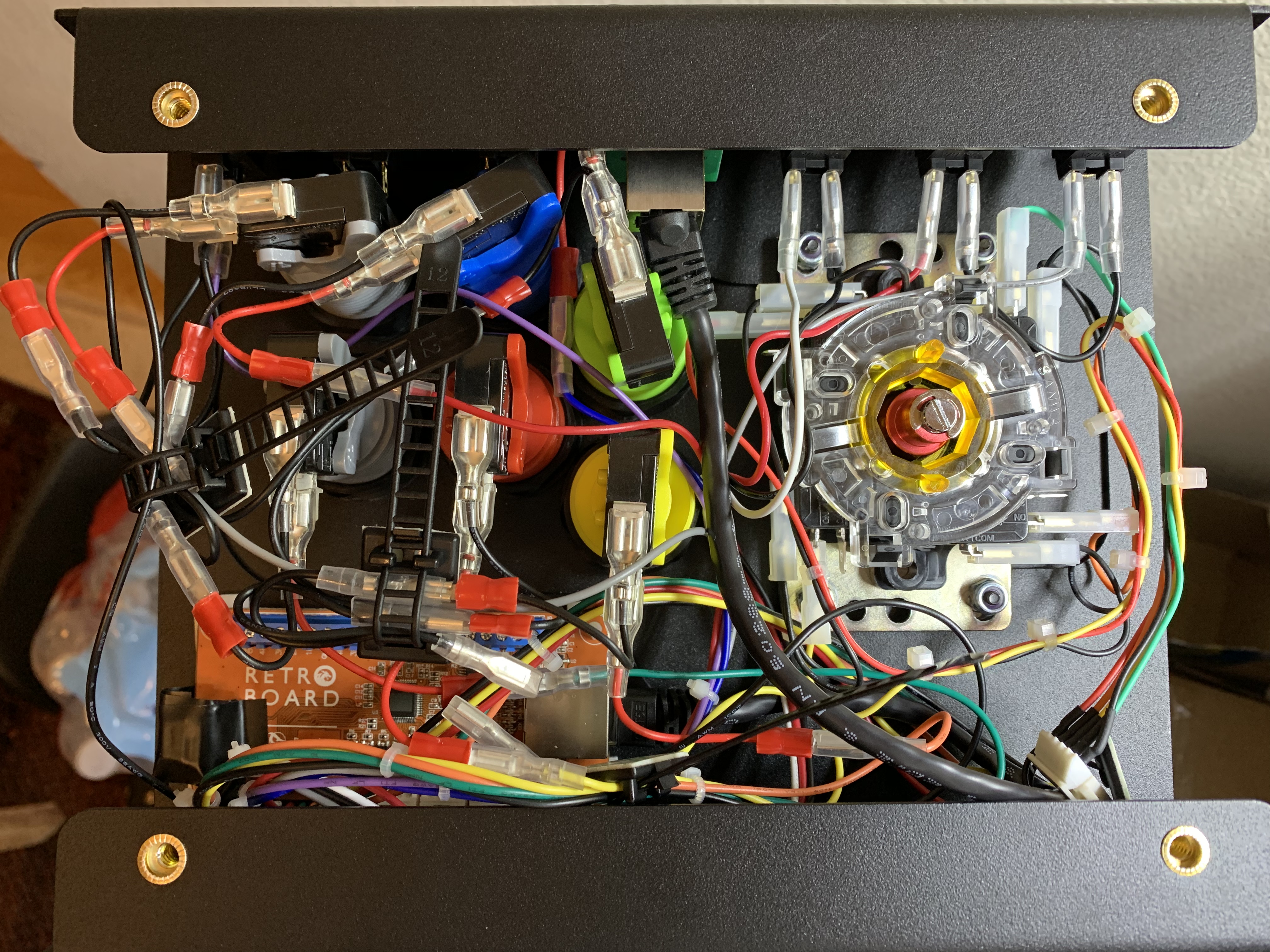
I agree that my build needs some serious wire management improvements. The 9.5 inch All Fight Sticks case is very tight, especially once you throw in short stem iL buttons. My main focus right now is experimentation with different snap action switches.
The thing I love about the JLF is its clickiness. Over time, my brain subconsciously uses the tactile feedback to ensure my moves have good timing. When upgrading the JLF spring to a 2lb spring or higher, the tension from the 200g Omrons makes up a smaller fraction of the total joystick tension, so the joystick feels less clicky with a 2lb spring compared to the extreme clicky feel of the stock 0.9pb spring. Swapping in 400g Omron switches fixes this and makes the joystick feel super clicky, even with a 2lb spring.
1 Like